
FAQ о расширенных геопространственных решениях DJI Enterprise
DJI Enterprise предлагает множество продуктов для профессионалов в области геопространства. Здесь представлены некоторые часто задаваемые вопросы и ответы на них, касающиеся следующих продуктов:
- Mavic 3 Enterprise
- Matrice M350/M300 RTK + Zenmuse L1
- Matrice M350/M300 RTK + Zenmuse P1
- DJI Terra
В этом документе содержатся ответы на часто задаваемые вопросы, а также подробная информация и технические характеристики каждого продукта. Кроме того, в нем содержатся советы и рекомендации по обработке данных и получению точных результатов.
Геопространственные решения
В чем плюсы и минусы при сравнении Mavic 3 Enterprise, Zenmuse L1 и Zenmuse P1?
| Продукт | Плюсы | Минусы |
| M350 RTK + Zenmuse L1 | – Высокая адаптивность: не зависит от условий освещения и позволяет моделировать в условиях низкой текстуры. – Результаты могут быть использованы для получения цифровой модели рельефа (ЦМР) с проникновением под навес. – Возможность легкого захвата тонких структур из облака точек, таких как линии электропередач. – Высокая эффективность моделирования: один полет может покрыть участок площадью 494 акра[1]. | – Точность относительно зависит от исходного состояния POS. – Требуется дальнейшая постобработка данных облака точек с помощью стороннего программного обеспечения, чтобы получить классифицированное облако точек для использования. |
| M350 RTK + Zenmuse P1 | – Поддержка нескольких режимов работы: 2D ортофото, 3D косой, съемка с близкого расстояния и т. д. – Высокая эффективность работы: один полет может собрать 741 акр ортофотоснимков [2]. – Высокая точность: Может соответствовать точности кадастровой съемки 1:500 без применения GCP. – Большое количество пикселей: до 45 миллионов пикселей с полнокадровой камерой. | – Не позволяет решить проблему ночного моделирования или моделирования территории с низкой текстурой. – Поскольку фотограмметрические решения не могут проникать под полог, как LiDAR, получаемые модели ограничены результатами DSM и не могут создавать результаты DEM. – Процесс фотограмметрии требует значительно большей вычислительной мощности GPU для выполнения аэротриангуляции и генерации моделей из необработанных изображений. В отличие от этого, данные LiDAR необходимо только преобразовать в универсальный формат для использования. Поэтому эффективность этапов сбора и обработки данных в фотограмметрическом решении будет ниже, чем в LiDAR-решении. |
| Mavic 3 Enterprise | – Низкий порог вхождения, высокая экономическая эффективность; – Маленький и портативный, простой в использовании – По сравнению с Phantom 4 Pro или Phantom 4 RTK, Mavic 3 Enterprise легче и портативнее, имеет лучшие возможности обхода препятствий, более длительный срок службы батареи и лучшие характеристики камеры. | – Относительно низкая эффективность работы по сравнению с P1 – Меньшее количество пикселей камеры по сравнению с P1 – Не подходит для крупномасштабных операций – Недостатки Zenmuse P1 также присутствуют в Mavic 3 Enterprise |
Примечание:
- [1] Скорость полета 22,37 миль/ч, высота полета 328 футов, боковое перекрытие 20%, время сбора данных 30 минут, плотность облака точек более 200 точек/м²*.
- [2] Используется объектив 35 мм, GSD 3 см, настройки полетного задания: курсовое перекрытие 75 %, боковое перекрытие 55 %.
При сравнении возможностей фотограмметрии между камерами:
| Mavic 3 Enterprise с модулем RTK (широкоугольная камера) | Matrice M350 RTK + Zenmuse P1 | Matrice M350 RTK + Zenmuse L1 | |
| Размер | Малый размер | Средний размер | Средние размеры |
| Класс съемки | Да | Да | Да |
| Поддержка RTK/PPK | Да | Да | Да |
| GSD (см) | H(m)/36.5 | 24 мм: H(m)/5535 мм: H(m)/8050mm: H(m)/120 | H(m)/36.5 |
| Размер сенсора | 4/3″5280 × 3956 (4:3) | Полнокадровый (35,9×24 мм) 8192 × 5460 (3:2) | 1″5472 × 3648 (3:2) |
| Разрешение фотосъемки | 20 МП | 45 МП | 20 МП |
| Размер пикселя | 3,3 мкм | 4,4 мкм | 2,4 мкм |
| Вариант объектива | Эквивалент 12 мм/24 мм FOV 84,0° | DL 24 мм; FOV 84,0° DL 35 мм; FOV 63,5° DL 50 мм; FOV 46,8° | 8,8 мм/24 мм ЭквивалентFOV 84,0° |
| Механический затвор | Да(1/2000-8с) | Да(1/2000-1с) | Да(1/2000-8с) |
| Минимальный интервал между снимками | 0.7s | 0.7s | 2.5s |
| Время полета | До 42 минут (с модулем RTK) | До 44 мин | До 42 мин |
| Требования к памяти | microSDUHS-I класса скорости 3 или выше Максимальная емкость: 512 ГБ | SD UHS-I или вышеМаксимальная емкость: 512 ГБ | microSD UHS-I Speed Grade 3 или вышеМаксимальная емкость: 256 ГБ |
| Максимальная ветроустойчивость | 12 м/с | 12 м/с | 12 м/с |
| Поддержка технологии Smart Oblique | Да | Да | Нет |
| Слежение за местностью в реальном времени | Да | Нет | Нет |
| Поддержка SDK и приложений сторонних разработчиков | Да | Да | Да |
Как получить доступ к параметрам дисторсии объектива?
Чтобы получить доступ к параметрам дисторсии объектива вручную, откройте изображение в формате “.jpg” как текстовый файл, найдите ключевое слово “DewarpData” в поле данных XMP. Формат текста должен быть таким: drone-dji: DewarpData = “2023-03-13;3663.4800000000…”.

Цифры в последовательности соответствуют: “calibrate_date;fx,fy,cx,cy,k1,k2,p1,p2,k3” “fx,fy” представляют фокусное расстояние в пикселях “cx,cy” представляют оптический центр, выраженный в пиксельных координатах (точка начала координат как центр изображения) “k1,k2, k3” представляют радиальную дисторсию “p1,p2” представляют тангенциальную дисторсию
Для получения дополнительной информации, пожалуйста, обратитесь к следующему руководству по калибровке камеры с помощью OpenCV.
Что представляет собой каждый столбец данных в файле XXX_Timestamp.MRK?
Столбец 1: Соответствующий номер фотографии
Столбец 2: Время экспозиции GPS, секунды недели (время UTC)
Столбец 3: Время экспозиции GPS в неделю (время UTC)
Колонка 4: Значение фазовой компенсации между северной антенной (N) и центром CMOS-сенсора. (Единица измерения: миллиметр)
Колонка 5: Значение фазовой компенсации между восточной антенной (E) и центром CMOS-сенсора. (Единицы измерения: миллиметр)
Столбец 6: Значение фазовой компенсации между направленной вверх и вниз (вниз как положительный) антенной (V) к центру датчика CMOS. (Единицы измерения: миллиметр)
Столбец 7: широта (столбец 8) и долгота (столбец 8) центра КМОП-матрицы в реальном времени, полученные в момент экспозиции, в десятичных градусах.
Колонка 9: Высота центра CMOS в реальном времени, полученная в момент экспозиции, в метрах. Эта высота – геодезическая высота (обычно известная как высота эллипсоида) относительно поверхности опорного эллипсоида по умолчанию (пользователи могут определить свою собственную модель эллипсоида, по умолчанию – WGS84, пользователи могут установить другие эллипсоиды, обратившись к различным системам/эталонам станций CORS, например CGCS2000). Обратите внимание, что эта высота не основана на широко используемом во всем мире эталоне высоты EGM96/2008 (ортометрическая высота).
Столбцы 10-12: Стандартное отклонение результатов позиционирования в направлениях на север, восток и вверх, соответственно, указывающее на относительную точность позиционирования в этих трех направлениях. Единица измерения – метр.
Колонка 13: Статус RTK, 0 – нет позиционирования, 16 – режим позиционирования по одной точке, 34-RTK – плавающее решение, 50-RTK – фиксированное решение. Если флаг фотографии не равен 50, не рекомендуется использовать эту фотографию непосредственно для картографирования.

Zenmuse L1
Можно ли использовать наземные контрольные точки (GCP) для обработки данных LiDAR в DJI Terra?
Terra не поддерживает импорт GCP для данных LiDAR. Однако для применения GCP к данным L1 LiDAR рекомендуется использовать стороннее программное обеспечение, такое как TerraSolid UAV software для применения GCP к данным L1 LiDAR.
Какой формат выходных данных Zenmuse L1 помимо LAS?
PNTS, PLY, PCD, S3MB
Можно ли обрабатывать необработанные данные L1 без подключения RTK? Можно ли обрабатывать необработанные данные Zenmuse L1 во время обычного GPS-полета?
Да, вы можете обрабатывать необработанные данные L1 без подключения RTK. Однако для корректной обработки и вывода файла облака точек в DJI Terra необходимо добавить файл наблюдения базовой станции (файл Rinex, RTCM, OEM или UBX) в папку с исходными данными L1 вместе с остальными исходными данными. Этот процесс называется кинематической постобработкой (PPK).
Более подробную информацию об этом процессе см. в руководстве по эксплуатации, а именно на странице 11.
Можно ли объединить данные из нескольких полетов с Zenmsue L1 в одно облако точек в DJI Terra?
Да, вы можете импортировать несколько папок с сырыми данными, полученными во время полетов L1, отметить опцию “Merged Output” и вывести облако точек в один LAS-файл с помощью Terra.
В чем разница между одинарным, двойным и тройным возвратом и каковы лучшие практики их использования?
Режим возврата/эха: Указывает на то, что лидар может получать несколько возвратов после выстрела пучком лазерного излучения.
Режим одинарного возврата означает, что выстреливается одна лазерная точка и лидар может получить не более одного возврата. Режим двойного возврата означает, что выстреливается одна лазерная точка и лидар может получить не более двух возвратов. Режим тройного возврата означает, что LiDAR может получить не более трех возвратов для каждой лазерной точки.
Если требуется только информация о поверхности или DSM, то достаточно режима с одним возвратом. Однако в таких сценариях, как лесная съемка, где требуется проникновение под полог и данные DEM, необходимо использовать режим двойного или тройного возврата.
Можно ли установить Zenmuse L1 на двойной нисходящий или восходящий карданный шарнир M350/M300 RTK?
Нет. Zenmuse L1 можно установить только на одинарный нисходящий кардан M300/M350 RTK. Если использовать его на двойном нисходящем или восходящем кардане, расположение кардана будет отличаться от предварительно заданного, что повлияет на точность.
Zenmuse P1
Будет ли объектив Zenmuse X7 работать на Zenmuse P1?
Только 24 мм, 35 мм и 50 мм. Объектив 16 мм не работает с P1 из-за размера матрицы.
После правильной калибровки точность будет соответствовать требованиям к качеству съемки. Для калибровки и перезаписи параметров нового объектива в первый раз можно использовать программное обеспечение DJI Terra, процедура описана ниже.
Я сменил объектив Zenmuse P1, и теперь все параметры искажений объектива камеры устарели, как мне откалибровать внутренние параметры с новым объективом?
Чтобы проверить, правильно ли откалиброван объектив P1, сначала откройте фотографию P1.jpg в виде текстового файла и найдите поле данных XMP “DewarpData”. Если это поле отсутствует в списке, значит, объектив был откалиброван неправильно. Чтобы заново откалибровать параметры дисторсии объектива, выполните следующую процедуру:
- Соберите данные калибровки
- Рекомендуется выполнять калибровку в местах с большим перепадом высот, таких как здания или склоны холмов.
- Для планирования миссии используйте Smart Oblique Capture или Oblique Mission (пять маршрутов).
- Требования к параметрам: Количество собранных изображений должно быть более 100, фронтальное перекрытие должно быть не менее 80%, боковое перекрытие – не менее 70%, на косое изображение приходится не менее 2/3. (Высота полета не ограничена)
- Включите RTK и взлетайте после RTK FIX.
- Моделирование: Используйте DJI Terra версии 2.3.1 и выше, чтобы создать новую миссию 3D реконструкции и начать моделирование.
- Калибровка
- После завершения моделирования откройте папку, найдите файл sfm_report.json в директории AT-report и скопируйте его на SD-карту камеры;
- Вставьте SD-карту в камеру P1, подключите ее к самолету и включите питание. После калибровки камера автоматически запишет внутренние параметры.
- Сделайте снимок, откройте его с помощью Блокнота и найдите XMP. Если вы найдете DewarpData, это означает, что калибровка внутренних параметров камеры прошла успешно.
Можно ли установить Zenmuse P1 на двойной нисходящий или восходящий карданный шарнир M350/M300 RTK?
Нет. Zenmuse P1 можно установить только на одинарный нисходящий кардан M300/M350 RTK. Если использовать его на двойном нисходящем или восходящем кардане, расположение кардана будет отличаться от предварительно заданного, что повлияет на точность.
DJI Terra
Существует ли программное обеспечение для обработки фотограмметрии, которое может сшивать и преобразовывать снимки с дрона в 2D-карту или 3D-модель?
Да, для этого можно использовать программу DJI Terra. DJI Terra может создавать цифровые модели поверхности (DSM) и истинные цифровые ортофотокарты (TDOM) в формате geotiff, а также 3D-модели сетки или облака точек.
Какое программное обеспечение вы рекомендуете для обработки снимков в ортофотокарту и создания цифровых поверхностей?
Мы рекомендуем использовать DJI Terra для автономной обработки или программное обеспечение сторонних производителей, которое соответствует вашим потребностям.
Что необходимо сделать перед обработкой фотографий с дрона в DJI Terra?
В настройках камеры перед полетом убедитесь, что опция “механический затвор” включена, а опция “деварпинг” отключена.
Если вы используете PPK, убедитесь, что данные о положении изображения корректны. Для RTK нет необходимости дополнительно обрабатывать снимки.
Какие дополнительные изменения в обработке могут быть применены к импортированным данным снимков с дрона в Terra?
При обработке в Terra нет настроек для регулировки концентрации цветов, экспозиции и других свойств. Пользователи могут изменять только POS-данные изображения, которые включают системы координат и углы Эйлера. Однако DJI Terra предоставляет дополнительные функции, такие как уменьшение дымки, уточнение поверхности воды и равномерность освещения, для обеспечения качества выходных данных реконструкции.
Как свести к минимуму размытые изображения, полученные с помощью дронов, во время полета?
Рекомендуем установить выдержку быстрее 1/500 с, включить механический затвор, установить ISO в автоматический режим и соответствующим образом настроить диафрагму.
Прилагается ли информация о GPS/IMU к полю метаданных фотографии?
Да, вы также можете ознакомиться с нашим руководством P1 на стр. 22-23 для получения дополнительной информации о поле метаданных XMP: Zenmuse_P1 _User Manual_EN_v1.2_3.pdf (djicdn.com)
Можно ли калибровать/классифицировать данные LiDAR, обработанные в DJI Terra?
Никакой классификации, кроме наземной. Terra также имеет базовые функции для уменьшения шума, разбавления облака точек.
Данные траектории Zenmsue L1 находятся в отдельном файле от облака точек LAS?
Да, они выводятся в формате “sbet.out” в папке результатов проекта Terra.
Датчик Zenmuse L1 LiDAR также оснащен RGB-камерой, являются ли выходные данные цветным облаком точек?
Фотографии могут быть получены одновременно с необработанными данными облака точек. Эти фотографии могут быть использованы для обработки фотограмметрии или колоризации облака точек.
Terra преобразует данные в облако точек LAS, но какая версия LAS v1.2 или 1.4?
LAS v1.2
Каков рекомендуемый рабочий процесс для Zenmuse L1?
Пожалуйста, ознакомьтесь с нашим руководством по работе с L1, доступным на странице загрузки L1.
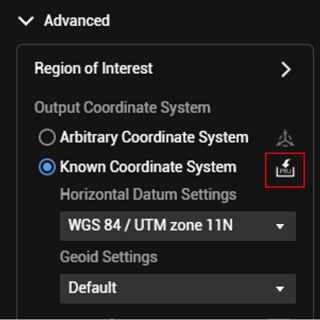
Как вывести фотограмметрический проект в известной системе координат?
В разделе “Дополнительно” – “Система координат” – “Известная система координат” – выберите известную систему координат в “Настройках горизонтального отсчета” и “Настройках геоида”.

В списке известных систем координат Terra нет нужной мне системы координат. Как ее установить?
- Если у вас есть файл проекции системы координат в формате “.prj”, в разделе “Дополнительно” – “Выходная система координат” – “Известная система координат” – нажмите на значок импорта PRJ и выберите импорт системы координат в формате PRJ.
Если целевая система координат использует пользовательскую картезианскую систему, вы можете преобразовать результат TDOM/Model в пользовательскую картезианскую систему с помощью семипараметрического инструмента преобразования. Подробные инструкции по этому процессу см. на стр. 29 руководства пользователя Terra.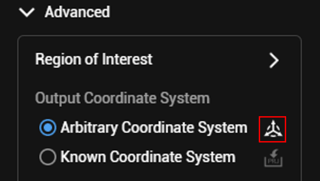
Если при выборе вертикальной системы координат выходная ошибка значительно увеличивается, как следует поступить в этом случае?
- Система вертикальных координат Smart Map использует только общедоступную информацию о системе вертикальных координат. Уточните, добавлен ли файл рельефа.
- Если в используемую систему вертикальных координат не добавлен файл высот, а файл аномалий высот для данной территории не является общедоступным, рекомендуется повысить точность определения высот путем добавления дополнительных GCP.
Следование рельефу
Как использовать функцию Terrain Follow в приложении Pilot 2?
В приложении Pilot есть несколько способов планировать полеты по маршруту Terrain Follow.
- Модель ASTER GDEM V3 30m встроена в приложение Pilot в качестве опции. Выберите картографическую миссию, включите Terrain Follow, выберите DSM-файл, затем выберите загрузку из Интернета.
- Импорт DSM/DEM в формате TIFF в Pilot. Выберите картографическую миссию, включите Terrain Follow, выберите DSM-файл, затем выберите TIFF для импорта модели рельефа.
- Слежение за местностью в реальном времени (доступно только для Mavic 3 Enterprise, Thermal и Multispectral).
Вот краткая сводная таблица, объясняющая совместимость функции Terrain Follow с различными режимами миссий:
| Типы миссий, которые теперь поддерживают функцию следования за местностью | ||||
| 2D-картография | Интеллектуальное косоугольное | Облик | Линейный | |
| M3E DSM Following | ✓ | ✓ | ✓ | ✓ |
| M3E Слежение за местностью в реальном времени | ✓ | ✓ | X | ✓ |
| M3T DSM Following | ✓ | X | ✓ | ✓ |
| M3T Слежение за местностью в реальном времени | ✓ | X | X | ✓ |
| M30 DSM Following | ✓ | X | ✓ | ✓ |
| M300 RTK DSM Following | ✓ | ✓ (Только с P1) | ✓ | ✓ |
Почему я не могу импортировать файл WGS84 DSM tiff в приложение Pilot 2?
Пожалуйста, используйте геодезическую WGS84 вместо проецируемой WGS84. Pilot 2 распознает только геодезическую ЦМР/ЦМР EPSG 4326 WGS84.
Форматы фотографий и настройки камеры
Каков список форматов фотографий для камер Mavic 3 Enterprise, Zenmuse P1 и Zenmuse L1?
- L1: JPG
- P1: JPG+DNG
- Mavic 3 Enterprise: JPG+DNG
Какие настройки входа камеры можно изменить?
Настройки режима камеры (Auto, S, A, M), ISO, диафрагма, выдержка, значения экспозиции, режим фокусировки (AF/MF).
Может ли сенсор Zenmuse P1 снимать большие/малые tiff 8/16 бит?
Нет, но Zenmuse P1 выводит необработанный файл в DNG.
Какие настройки камеры рекомендуются для Mavic 3 Enterprise, Mavic 3 Multispectral и Zenmuse P1 при выполнении фотограмметрических миссий?
Настройки камеры для Mavic 3 Enterprise:
- Убедитесь, что отключена настройка “dewarping”.
- Убедитесь, что включена настройка “Механический затвор”.
- Выберите “MF” в качестве режима фокусировки и установите фокус на бесконечность
- Выберите “Авто” для режима настройки камеры
- Если вы хотите установить настройки камеры вручную для фотограмметрии, мы рекомендуем:
- Установите ISO на авто
- Установите выдержку на 1/1000 с или быстрее, чтобы избежать размытия движения (механическая до 1/2000 с)
- Установите EV на 0
- Установите автоэкспозицию в диапазоне от 5,6 до 11
Настройки камеры Zenmuse P1:
- Убедитесь, что отключена настройка “dewarping”.
- Убедитесь, что включена настройка “Механический затвор”.
- Выберите “MF” в качестве режима фокусировки и установите фокус на бесконечность
- Выберите “M” для режима настройки камеры
- Установите автоматическое ISO
- Вручную установите диафрагму в зависимости от окружающего освещения. Убедитесь, что диафрагма находится в диапазоне 5,6-11
- Установите выдержку 1/500 с или быстрее, чтобы избежать размытия движения (в механическом режиме до 1/2000 с).
Что такое опция “дьюарпинг” в настройках камеры приложения Pilot 2 и нужно ли ее включать?
Включение функции dewarping позволяет откалибровать оптические искажения, вызванные объективом камеры, при этом откалиброванные изображения в реальном времени снимаются и сохраняются на карте Micro-SD. Отключение коррекции искажений означает, что камера будет снимать неотредактированное изображение с эффектом “рыбий глаз”. Параметры дисторсии объективов Zenmuse P1, Zenmuse L1, Mavic 3 Enterprise wide lens, Mavic 3 Multispectral wide lens и Phantom 4 RTK предварительно измеряются на заводе. Эти уникальные параметры сохраняются в “DewarpData” в поле XMP для каждого сделанного изображения. Они автоматически распознаются при импорте этих изображений в программное обеспечение DJI Terra. Однако для сторонних программ фотограмметрии пользователь может вручную ввести эти параметры для калибровки искажений изображения. Поскольку калибровка искажений с помощью программного обеспечения для постобработки с параметрами dewarp камеры имеет гораздо более высокую точность по сравнению со встроенной функцией коррекции искажений в приложении Pilot 2, мы рекомендуем отключить эту опцию для целей геодезии.

RTK/PPK
Какая система координат записывается в геотеги на фото? Всегда ли это геодезическая система WGS84?
Нет, система координат снимков зависит от источника коррекции NTRIP RTK и не всегда попадает в WGS84. Если вы используете мобильную станцию D-RTK2 в качестве источника RTK, то горизонтальная система координат будет в WGS84 EPSG:4326, а вертикальная – в эллипсоиде. В Terra необходимо задать систему при импорте изображений; в противном случае Terra по умолчанию установит для всех изображений горизонтальную систему координат WGS84 (EPSG:4326), а вертикальную – эллипсоидальную высоту.
Как использовать RTK-базу сторонних производителей с дронами DJI Enterprise?
Для базовых станций RTK сторонних производителей необходимо сначала настроить трансляцию сервиса NTRIP и убедиться, что база RTK и M3M RC находятся в одной сети Wi-Fi, а затем на странице Pilot app – RTK setting обязательно ввести учетные данные для настройки соединения NTRIP. Более подробную информацию вы можете найти в руководстве на странице 46.
Необходимо ли инициализировать базовую станцию D-RTK2 в известном месте перед использованием?
Ответ на этот вопрос зависит от того, используете ли вы RTK для высокоточного позиционирования и заботитесь только об относительной точности, или вы используете RTK для регистрации данных высокой глобальной точности, например, для геодезических работ. В первом случае ответ будет отрицательным, а во втором – положительным.
Можно ли подключить беспилотник DJI Enterprise с RTK к стороннему сервису подписки NTRIP?
Да, дрон DJI Enterprise с RTK может напрямую подключаться к сетевым RTK-сервисам, поддерживающим NTRIP, таким как Topcon Topnet Live, Leica Smartnet и Trimble VRS. Это упрощает настройку сервиса.
Как обеспечить высокую точность собранных данных на новом участке, где нет известных точек для установки базовой станции D-RTK2?
Если доступен сервис NTRIP, вы можете подключиться к Интернету и использовать RTK через NTRIP-кастер, если базовая линия (расстояние между дроном и NTRIP-кастером) не слишком далеко. Если интернет недоступен, вместо RTK можно использовать рабочий процесс PPK для постобработки данных базовой станции, а также данных снимков с дрона. Подробнее о PPK можно узнать здесь.
Какие типы сообщений RTCM поддерживаются дронами DJI Enterprise с поддержкой RTK?
Обратитесь к следующей таблице, чтобы найти поддерживаемые типы сообщений RTCM, соответствующие моделям дронов:
| Платформа | Модуль RTK | Поддерживаемый сервис RTK | Поддерживаемый протокол NTRIP Тип сообщения RTCM |
| Matrice M300 RTK Matrice M350 RTK | Двойные антенны RTK | Пользовательский сетевой RTK (NTRIP) DJI D-RTK 2 | RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
| Matrice M30 Matrice M30T | Двойные антенны RTK | Пользовательские сетевые RTK (NTRIP) DJI D-RTK 2 | RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
| Mavic 3 Enterprise Mavic 3 Thermal Mavic 3 Multispectral | Опционально; модуль RTK продается отдельно | Пользовательский сетевой RTK (NTRIP) DJI D-RTK 2 | RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
| Phantom 4 RTK | Одиночная антенна RTK | Пользовательская сетевая RTK (NTRIP) DJI D-RTK 2 | RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC |
| Mavic 2 Enterprise Advanced | Опционально; модуль RTK продается отдельно | Пользовательский сетевой RTK (NTRIP) | TCM 3.0 RTCM 3.1 RTCM 3.2 |