
Освоение LiDAR с помощью DJI Enterprise: Вводный буклет
В современном быстро развивающемся технологическом ландшафте LiDAR является ключевым инструментом для решения различных задач, от управления лесным хозяйством до инспекции инфраструктуры. Окунитесь в мир LiDAR с помощью всеобъемлющего руководства DJI Enterprise. От основополагающих принципов до реальных применений – эта брошюра снабдит читателей необходимыми знаниями о технологии LiDAR и ее преобразующем потенциале.
Введение и принципы технологии LiDAR
Что такое LiDAR?
LiDAR, что расшифровывается как Light Detection and Ranging, – это технология дистанционного зондирования, которая использует быстрые лазерные импульсы для создания карты поверхности объекта. Посылая лазерный луч и измеряя время, необходимое для отражения света от объектов, LiDAR создает подробные трехмерные карты точек.
Представьте, что вы находитесь в абсолютно темной комнате с фонариком. Если вы направите фонарик на различные предметы, свет отразится от них, и, увидев этот свет, вы сможете получить представление о том, где и как далеко они находятся. Чем больше раз вы посветите фонариком и под разными углами, тем лучшее представление о планировке помещения вы получите. LiDAR работает аналогично, но вместо видимого света, как в фонарике, он использует невидимый лазерный свет. Вот как это работает:
1. Излучение: Устройство LiDAR посылает быстрый импульс лазерного света в сторону объекта.
2. Отражение: Свет отражается от объекта и возвращается на датчик LiDAR.
3. Обнаружение: Устройство измеряет время, необходимое для возвращения света. Поскольку скорость света является постоянной величиной, это время можно использовать для расчета расстояния между датчиком LiDAR и объектом.

LiDAR в сравнении с фотограмметрией
Система LiDAR измеряет данные, в то время как система фотограмметрии их вычисляет. Это ключевое различие делает их более подходящими для разных приложений. LiDAR использует лазерные импульсы для измерения реальности, что делает его идеальным для приложений, требующих абсолютной достоверности данных. LiDAR может проникать сквозь растительность и не зависит от условий освещения, что делает его отличным вариантом для картографирования лесов и других территорий с густым растительным покровом. LiDAR также полезен для создания точных моделей местности и топографических карт.
Фотограмметрия использует камеры для получения перекрывающихся изображений местности, которые затем сшиваются вместе для создания 3D-модели или орто-карты. Этот метод менее дорогой, чем LiDAR, и может использоваться с готовым оборудованием, таким как беспилотники и камеры. Это делает его полезным для создания высокодетализированных моделей зданий и инфраструктуры, а также ортокарты высокого разрешения для инспекций и мониторинга.
| Аспект | Фотограмметрия | LiDAR |
|---|---|---|
| Определение | Метод получения измерений и 3D-моделей по фотографиям. | Метод дистанционного зондирования, использующий лазерное излучение для измерения расстояний и создания точных 3D-моделей земной поверхности. |
| Точность | Высокая точность в хорошо освещенных и ясных условиях после нанесения GCPs под RTK. | Точность зависит от исходного состояния POS, не зависит от условий освещения. |
| Стоимость | Как правило, низкая стоимость, более доступная для небольших проектов. | Более высокая стоимость из-за сложного оборудования и требований к обработке. |
| Работа с местностью | Хорошо работает в городских условиях и на чистых ландшафтах. | Отлично работает на различных участках местности, включая густую растительность и городские ландшафты. |
| Обработка данных | Требует много времени на обработку, особенно для больших наборов данных. | Обработка происходит быстрее, так как данные изначально захватываются в формате пространственных координат. |
| Условия освещения | Для получения оптимальных результатов требуется хорошее освещение. | Эффективно при любом освещении, включая ночное. |
| Проникновение в растительность | С трудом справляется с густой растительностью. | Способен проникать сквозь густую растительность и достигать земли. |
| Зависимость от погодных условий | На производительность могут влиять погодные условия, такие как облачность и дождь. | Менее подвержена влиянию погодных условий. |
| Пространственное разрешение | Высокое пространственное разрешение для детализации поверхности. | Более низкое пространственное разрешение по сравнению с фотограмметрией. |
| Применение | Идеально подходит для документирования культурного наследия, мелкомасштабного картографирования и архитектуры. | Лучше всего подходит для крупномасштабного топографического картографирования, лесного хозяйства и городского планирования. |
Из каких компонентов состоит интегрированная воздушная система LiDAR?
Компоненты оборудования
Система LiDAR
- Модуль LiDAR: Наиболее важный компонент системы LiDAR, лазерный модуль генерирует импульсный лазерный луч, который направляется на целевую поверхность. Лазерный модуль состоит из множества компонентов, включая источник лазерного излучения, приемник, оптические компоненты и электронный контроллер.
- Источник лазерного излучения: Генерирует короткие импульсы лазерного излучения, которые используются для измерения расстояния между датчиком LiDAR и объектами в окружающей среде.
- Приемник: Обнаруживает отраженный лазерный свет и преобразует его в электронный сигнал, который может быть обработан системой LiDAR.
- Оптические компоненты: Эти компоненты отвечают за направление и фокусировку лазерного луча на целевую поверхность и сбор отраженного света.
- Электронный контроллер: контролирует время и длительность лазерных импульсов и обрабатывает сигналы, поступающие от приемника.
- Приемник GNSS (глобальной навигационной спутниковой системы) используется для обеспечения точной привязки результатов сканирования LiDAR. Большинство беспилотных систем LiDAR либо используют собственную систему GNSS для регистрации спутниковых данных для привязки к местности и постобработки, либо интегрированы с DJI PSDK и используют систему GNSS от системы дрона.
- IMU (Inertial Measurement Unit) – это устройство, которое измеряет ускорение и угловую скорость системы LiDAR. Интегрируя эти измерения по времени, IMU может определить положение, скорость и ориентацию системы LiDAR в трехмерном пространстве. Эта информация используется для корректировки любых движений или вибраций системы LiDAR в процессе сбора данных.
- INS (инерциальная навигационная система) использует исходные данные IMU и интегрирует их для получения информации о положении, скорости и ориентации объекта относительно известной начальной точки, ориентации и скорости. INS использует данные IMU и интегрирует их с информацией о позиционировании GNSS, чтобы обеспечить непрерывную оценку положения и ориентации датчика LiDAR во время захвата данных.
Система БПЛА
- БПЛА или беспилотный летательный аппарат используется для полета системы LiDAR над исследуемой территорией и может быть оснащен собственной системой GNSS и RTK/PPK для точной привязки системы LiDAR к местности.
Компоненты программного обеспечения
- Программное обеспечение Flight Mission Planning используется для планирования траектории полета беспилотника, оснащенного системой LiDAR. Это программное обеспечение позволяет пользователю определить область, которую необходимо исследовать, а затем автоматически генерирует маршрут полета на основе путевых точек. Пользователь может настроить параметры системы БПЛА и действия датчиков для автономного полета по путевым точкам. Затем программа генерирует маршрут полета, который эффективно охватывает территорию и собирает необходимые данные для системы LiDAR. Эти данные могут быть использованы для создания подробных 3D-карт или моделей исследуемой территории.
- Программное обеспечение для мониторинга и управления полетом позволяет пользователю отслеживать траекторию полета и состояние БПЛА и системы LiDAR в режиме реального времени во время сбора данных. Программное обеспечение может отображать различные параметры, такие как высота, скорость и уровень заряда батареи. Эта информация крайне важна для обеспечения безопасности БПЛА и сбора высококачественных данных LiDAR. Кроме того, программное обеспечение для мониторинга полета может предупредить пользователя в случае возникновения каких-либо проблем или неисправностей во время полета.
- Программное обеспечение для обработки облака сырых точек – это OEM-программное обеспечение, разработанное производителями датчиков. Оно используется для обработки необработанных данных LiDAR, полученных от всех компонентов системы, и вывода данных LiDAR в удобный для манипулирования формат, например LAS/LAZ, для дальнейшего использования.
- Программное обеспечение для обработки облаков точек относится к компьютерным программам, предназначенным для манипулирования и анализа данных облаков точек. В зависимости от области применения, программное обеспечение для обработки облаков точек может использоваться для решения различных задач, таких как создание чертежей, выполнение измерений, извлечение поверхностей, классификация и т. д.

Ключевые термины и знания
Отражательная способность поверхности объекта
- Различные поверхности объектов имеют разную отражательную способность.
- Большинство поверхностей объектов имеют отражательную способность более 10 %.
- Вода является сильным поглотителем, и типичный лазер LiDAR с длиной волны 905 нм будет поглощаться напрямую. Если только LiDAR не относится к батиметрическому типу и длина волны лазера не короче, он не проникнет в воду.
Вот некоторые примеры коэффициентов отражения поверхности:
- Свежий асфальт: 4-7%
- Сухая трава: 15-20 %
- Лесной полог: 5-20%
- Мокрый бетон: 30-50%
- Снег: 60-90%
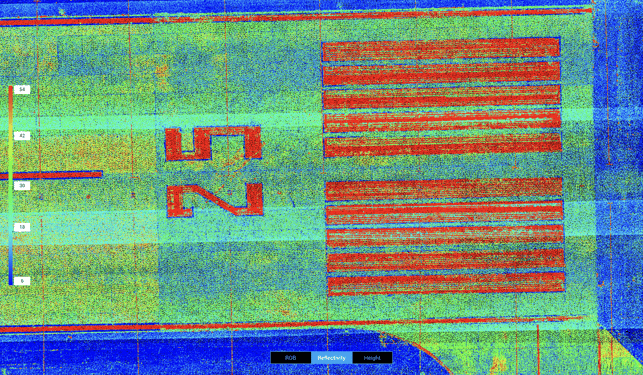
Облако точек окрашено по отражательной способности поверхности (красный цвет – высокий, синий – низкий).
Методы сканирования LiDAR
Изменяя метод вращения датчика LiDAR, система LiDAR может достичь двух различных механических режимов сканирования: повторяющееся сканирование и неповторяющееся сканирование.
Метод повторного сканирования
Повторное сканирование охватывает только горизонтальную область FOV (70,4°×4,5°).
Преимущество: при мобильном картографировании объекты сканируются только в течение очень короткого периода времени, так как дрейф точности инерциальной навигации очень мал за короткий период времени, поэтому сканируемая модель относительно более точная.
Недостатки: Вертикальный FOV очень мал, и информация о вертикальной поверхности практически отсутствует. Если требуется информация о вертикальной поверхности, необходимо планировать как минимум две траектории полета, чтобы компенсировать потерю вертикального FOV.
Применение: Для сценариев с относительно мягким рельефом и высокими требованиями к точности, таких как измерение рельефа, общее создание DEM/DSM.
*Для обеспечения точности облака точек рекомендуется использовать повторное сканирование при съемке.
: Для сценариев с относительно мягким рельефом и высокими требованиями к точности, таких как измерение рельефа, общее создание DEM/DSM.
*Рекомендуется использовать повторное сканирование для обеспечения точности облака точек.
Анимация повторного сканирования (вид сверху вниз)
Метод неповторяющегося сканирования
Неповторяющееся сканирование позволяет быстро покрыть весь FOV (70,4°×77,2°).
Преимущества: Обеспечивает полное покрытие FOV, может выполнять вертикальное сканирование и получать хорошую вертикальную информацию с одного сканирования без установки угла наклона кардана.
Недостатки: При мобильном картографировании объекты сканируются в разных положениях и в разное время, что зависит от точности инерциальной навигации. Если точность инерциальной навигации со временем снижается, то и точность модели уменьшается. Это приводит к появлению размытых или дублированных объектов, более толстых облаков точек и толстых проводов. Этот эффект особенно заметен при неповторяющемся сканировании, которое имеет большее поле зрения.
Применение: Подходит для сценариев с относительно низкими требованиями к точности, высокой эффективностью и требованиями к полноте информации о рельефе, таких как городское 3D-моделирование, моделирование сложных трехмерных структур, инспекция линий электропередач, оперативное картографирование в чрезвычайных ситуациях и т.д.
*В сценарии обследования ЛЭП, если выбран однолинейный полет, рекомендуется использовать метод неповторяющегося сканирования.
Анимация неповторяющегося сканирования (вид сверху вниз)
Длина волны
Системы LiDAR используют лазеры для излучения импульсов света, при этом длина волны лазера определяет характеристики импульса. Длина волны лазера влияет на способность системы LiDAR проникать через различные материалы и типы отражений, которые она может обнаружить. Ниже приведены два распространенных типа LiDAR и соответствующий им диапазон длин волн
- Ближний инфракрасный (NIR) LiDAR обычно использует лазеры с длиной волны от 800 до 1 000 нанометров. Системы NIR LiDAR лучше проникают сквозь растительность и могут обнаружить несколько возвратов от одного импульса, что делает их идеальными для применения в лесном хозяйстве. Однако эти системы LiDAR не могут проникать в воду и не подходят для батиметрических приложений.
- Батиметрические LiDAR используют более короткие длины волн света в зеленом и синем спектре для проникновения в воду и измерения глубины морского дна. Зеленый лазерный свет с длиной волны 532 нм наиболее часто используется для батиметрического LiDAR, поскольку он лучше других длин волн проникает в воду. Синее лазерное излучение с длиной волны 445 нм также используется в некоторых батиметрических системах LiDAR, поскольку оно обеспечивает лучшее проникновение в условиях прозрачной воды. Батиметрические системы LiDAR используются в таких областях, как картографирование морского дна, управление прибрежными зонами и обследование подводной инфраструктуры.
Дальность обнаружения
Дальность обнаружения – это максимальное расстояние, на котором система LiDAR может точно обнаружить и измерить объекты. На дальность обнаружения системы LiDAR влияет несколько факторов, включая мощность и длину волны лазера, чувствительность приемника и отражательную способность сканируемых объектов. Как правило, для определения дальности обнаружения используется отражающая способность поверхности объекта или условия окружающей среды.

Стоит отметить, что максимальная дальность обнаружения, указанная производителями LiDAR, обычно проверяется на основе отражающей способности 90 %, что не имеет смысла для практического использования. Дальность обнаружения при отражающей способности 10 % имеет больше практического смысла, поскольку применима к большинству поверхностей.
Большая дальность обнаружения желательна для систем LiDAR, поскольку позволяет увеличить площадь покрытия и собрать более полные данные.
Множественные возвраты
Лазер в системе LiDAR посылает импульсы. Когда эти импульсы попадают на препятствия, они отражаются обратно. Поскольку свет не блокируется полностью, он продолжает идти дальше, отражаясь каждый раз при столкновении с препятствием. Поэтому кажется, что LiDAR может “видеть” сквозь растительность. Но на самом деле LiDAR обнаруживает землю и полог деревьев, заглядывая в щели между листьями.
- Первое возвращение: Это первое отражение, которое фиксирует датчик, часто от самого верхнего объекта на пути лазерного импульса (например, верхушки деревьев или зданий).
- Промежуточные возвраты: Это отражения от объектов между самым верхним объектом и землей (например, ветвей или окон).
- Последний возврат: Обычно это отражение от земли или основания объекта.
*Дождь или смог в воздухе могут вызвать помехи и шум в данных LiDAR. В таких ситуациях рекомендуется использовать самый сильный “одиночный возврат”.
Смежные приложения

Возможность обнаружения нескольких возвратов позволяет получить более подробное представление об объекте. Например:
- Выделение растительности: Выделение отдельных растений, их подсчет, вычисление биомассы и анализ параметров растительности.
- Топографическое картографирование: Извлечение DEM (цифровой модели рельефа) из DSM (цифровой модели поверхности) для анализа рельефа.
- Моделирование линий электропередач: Линии электропередач часто пересекаются, а возможность многократного возврата позволяет измерять несколько слоев проводов за один раз, сокращая количество пропущенных данных из-за препятствий.
Расхождение лучей
Расхождение луча относится к распространению или расширению лазерного луча на расстоянии. Расхождение луча представляет собой угол, под которым распространяется лазерный луч по мере того, как он удаляется от датчика LiDAR и удаляется от своей точки начала.
По сути, меньшее расхождение луча означает, что лазер остается более сфокусированным на больших расстояниях, в то время как большее расхождение луча означает, что лазер будет сильнее расходиться по мере движения.
Влияние на проникновение под полог
В таких условиях, как лес, меньшая расходимость луча (более сфокусированный луч) обычно эффективнее проникает сквозь полог и достигает земли под ним. Это происходит потому, что более концентрированный лазерный луч легче находит зазоры между листьями и ветвями, что приводит к лучшему обнаружению наземных точек. С другой стороны, лазер с большей расходимостью луча может сильнее рассеиваться от полога и не достигать лесной подстилки так эффективно.

Влияние на плотность точек и разрешение
Хотя более сфокусированный луч (меньшая расходимость) может дать более точные результаты с высоким разрешением, луч с большей расходимостью может покрывать большую площадь каждым импульсом, что приводит к потенциально более низкой плотности точек и разрешению на цели.Влияние на плотность точек и разрешение
Влияние на дальность и распределение энергии
Лазеры с меньшей расходимостью луча сохраняют концентрацию энергии на больших расстояниях. Это очень важно для систем LiDAR, которые должны работать на больших расстояниях. При большем расхождении луча энергия распределяется по большей площади, что потенциально снижает силу обратного сигнала, особенно на больших расстояниях.
Взаимодействие с атмосферой
Расхождение луча может также играть роль в том, как лазер взаимодействует с частицами в атмосфере, такими как пыль, туман или дождь. Лазерный луч с большим расхождением может сильнее рассеиваться из-за взаимодействия с этими частицами, что может снизить эффективную дальность и точность системы LiDAR в определенных условиях.
Частота выборки
Частота дискретизации – это количество точек, собранных системой LiDAR за определенный период. Она измеряется в герцах (Гц). Более высокая частота дискретизации означает, что в секунду собирается больше точек, в результате чего облако точек получается более плотным.
Однако более высокая частота дискретизации также означает, что собирается больше данных, что может привести к увеличению размера файлов и увеличению времени постобработки. Поэтому частоту дискретизации системы LiDAR следует тщательно выбирать, исходя из конкретных потребностей проекта в плотности.
Важно отметить, что частота дискретизации сама по себе не определяет точность данных LiDAR. Другие факторы, такие как расхождение лазерного луча и точность IMU и GPS, также играют важную роль в определении точности данных.
Калибровка IMU
Точность LiDAR тесно связана с точностью IMU. Когда дрон летит в постоянном темпе, IMU может потерять свою точность. Поэтому большинство воздушных систем LiDAR требуют калибровки IMU до, во время и после полета. Если IMU не откалиброван, это может привести к неточным данным, что повлияет на последующий анализ и приложения, которые полагаются на данные LiDAR.
Существует два распространенных метода калибровки IMU во время полета дрона: калибровка “восьмеркой” и “ускорение-замедление”. И ручной, и автоматический методы калибровки дают одинаковые результаты.
В интегрированной системе LiDAR компании DJI используется метод калибровки “ускорение-замедление”, и процесс калибровки IMU автоматически интегрируется при выполнении любого полета. При ручном управлении системой DJI LiDAR приложение DJI Pilot напомнит пользователю о необходимости повторной калибровки IMU через некоторое время полета.

Факторы, влияющие на эффективность
На эффективность и скорость проникновения могут влиять различные факторы технологии LiDAR. Расхождение лучей и многократное возвращение играют роль в проникновении, а калибровка IMU влияет на точность. Выравнивание полос влияет на точность, а различные методы сканирования – на охват и плотность вертикального сканирования. Скорость полета и частота дискретизации также влияют на плотность.
Факторы, влияющие на плотность:
- Частота выборки: Более высокая частота повторения импульсов (PRF) или частота дискретизации может привести к более высокой плотности точек при условии, что другие факторы, такие как скорость полета и высота, остаются неизменными.
- Высота полета: Полет на меньшей высоте обычно приводит к большей плотности точек, поскольку лазерные импульсы оказывают меньшее влияние на землю.
- Перекрытие: Съемка с перекрывающимися линиями полета может увеличить плотность точек в перекрывающихся областях.
- Рельеф и растительность: Такие особенности, как густые леса, могут привести к многократным возвратам от одного лазерного импульса, что потенциально увеличивает эффективную плотность в этих областях.
- Скорость полета: Более низкая скорость полета позволяет увеличить плотность точек, поскольку у датчика LiDAR есть больше времени, чтобы послать лазерные импульсы и обнаружить их возвращение.
Обработка необработанных данных LiDAR
Плотность облака точек
Плотность характеризует количество точек LiDAR, собранных на единицу площади. Часто ее выражают в точках на квадратный метр (pts/m^2). Например, плотность 10 pts/m^2 означает, что в среднем на каждый квадратный метр исследуемой территории приходится 10 точек LiDAR.
Различные вертикальные отрасли предъявляют разные требования к плотности облака точек:
- Геодезия и картография: Для карт масштаба 1:500 требуемая плотность облака точек составляет ≥16 точек/квадратный метр.
- Инспекция линий электропередач: Для детального анализа заграждений из деревьев или тщательной инспекции линий электропередач обычно требуется не менее 25 точек/кв. м. Некоторые спецификации требуют еще большей плотности, обычно от 50 до 250 точек на квадратный метр.
- Лесоустроительная съемка: Плотность облака точек не менее 20 точек/кв. м необходима для удовлетворения требований сегментации отдельных деревьев.

Программное обеспечение для обработки необработанных облаков точек обычно также имеет функцию регулировки плотности точек.
Проверка точности высот LiDAR
Проверка точности данных LiDAR с помощью контрольных точек высот – распространенный метод, позволяющий убедиться, что полученные цифровые модели высот (DEM) или цифровые модели рельефа (DTM) являются точным отображением местности.
Принципы установки контрольных точек рельефа:
- Контрольные точки должны быть равномерно распределены и находиться на видном месте.
- Избегайте их размещения в местах пересечения летных полос или резких перепадов высот.
- Контрольные точки должны располагаться на открытых и ровных поверхностях.
- Высотная привязка контрольных точек должна совпадать с высотной привязкой облака лазерных точек.
Рекомендации по контрольным точкам высоты:
- Располагайте контрольные точки равномерно в свободных местах.
- Не ставьте их там, где пересекаются траектории полетов или где уровень земли быстро меняется.
- Они должны находиться на открытой, ровной местности.
- Убедитесь, что их высота соответствует высоте, используемой в данных LiDAR.
Формат облака точек LAS
Формат LAS был разработан Американским обществом фотограмметрии и дистанционного зондирования (ASPRS) для обеспечения обмена данными облака точек LiDAR между различными компаниями и агентствами. Формат LAS – это стандартизированный формат файлов для хранения и обмена данными облака точек LiDAR, содержащий информацию о местоположении, интенсивности, классификации и других атрибутах каждой точки. Он также является результатом работы систем LiDAR компании DJI.
Формат LAS для данных облака точек включает в себя такую информацию, как трехмерные координаты точек, цвета RGB, отражательная способность, время GPS, количество возвратов и то, к какому возврату относится точка.
Версионность файла LAS может стать проблемой при попытке чтения или записи файла. Важно убедиться, что используемая версия файла LAS совместима со сторонним программным обеспечением, которое используется для его обработки. Некоторые программы сторонних разработчиков могут не считывать или записывать определенные версии файлов LAS. Если возникает проблема совместимости, может потребоваться использовать другую версию файла LAS или найти другое стороннее программное обеспечение, поддерживающее используемую версию. DJI Terra экспортирует данные облака точек LiDAR в формате LAS версии 1.2, который является высокосовместимой версией файла LAS.
Раскрашивание облаков точек
Раскрашенные облака точек могут предоставить пользователям дополнительный контекст, облегчающий интерпретацию и понимание данных. Например, здание и дерево могут иметь схожие структурные формы в некоторых аспектах, но цвет может мгновенно их отличить.
Большинство воздушных систем LiDAR оснащены RGB-камерами, которые делают снимки высокого разрешения одновременно со сбором данных LiDAR. Эти изображения можно использовать для присвоения цветовых значений соответствующим точкам LiDAR.
Преимущества окрашивания:
- Визуальная привлекательность: Цветные облака точек визуально более привлекательны и понятны, чем полутоновые.
- Улучшенный анализ: Цвет может предоставить дополнительную информацию, например, помочь в анализе растительности, различая различные типы растений, или в городском картографировании для различения различных инфраструктур.
- Интеграция с другими наборами данных: Колоризованное облако точек может быть легко интегрировано с другими наборами геопространственных данных, обеспечивая комплексное представление об исследуемой территории.
- Дополнительный процесс фотограмметрии: Для обработки фотограмметрии, помимо раскрашивания облака точек, можно использовать RGB-фотографии.

Траектория полета
Траектория полета – это путь, по которому летит БПЛА, оснащенный системой LiDAR, во время сбора данных. Траектория полета является важнейшим фактором при обработке данных LiDAR, поскольку она обеспечивает данные о местоположении каждой точки в облаке точек. Информация о траектории необходима для точной привязки данных LiDAR и создания точных 3D-моделей исследуемой территории.
SBET – это сглаженная наилучшая оценка траектории. Это широко используемый формат файлов с постобработкой, содержащий высокоточные данные GPS и IMU. Этот формат файла траектории может быть соотнесен с облаком точек LAS для дальнейшей постобработки. Файл траектории постобработки миссии LiDAR обычно создается автоматически вместе с LAS-файлом облака точек. Он может быть импортирован в стороннее программное обеспечение для отображения траектории.

Корректировка полос
Корректировка полос – это процедура исправления систематических ошибок и смещений в данных воздушного LiDAR, особенно если они собраны за несколько полетных полос. При съемке местности с помощью аэрофотосъемки LiDAR территория обычно покрывается несколькими перекрывающимися полосами или траекториями полета. Перекрытие происходит намеренно, чтобы обеспечить непрерывность покрытия и облегчить исправление ошибок.
Во время получения данных LiDAR несколько факторов могут вносить ошибки в данные:
- Дрейф датчиков: Со временем показания IMU и GPS могут немного смещаться.
- Динамика полета: Турбулентность, быстрая смена высоты и изменение ориентации самолета могут повлиять на полученные данные.
Из-за этих факторов соседние полосы полета могут иногда показывать вертикальные или горизонтальные несоответствия. Если не исправить эти ошибки, они могут повлиять на последующий анализ и приложения, использующие данные LiDAR.
Преимущества корректировки полос:
- Улучшение согласованности данных: Уменьшает несоответствия и обеспечивает непрерывность соседних полетных полос.
- Более высокое качество производных данных: Повышается качество производных продуктов, таких как цифровые модели рельефа (DEM) и цифровые модели поверхности (DSM).
- Надежность: Повышает уверенность в точности набора данных LiDAR, делая его более надежным для различных применений, от топографической картографии до лесного хозяйства.
Обработка необработанных данных LiDAR с помощью программного обеспечения DJI Terra
Программное обеспечение DJI Terra – единственное поддерживаемое программное обеспечение, используемое для обработки и экспорта необработанных данных облака точек LiDAR, полученных с помощью системы DJI LiDAR, в универсальный формат LAS.
Основные функции обработки LiDAR
DJI Terra – это бесплатное программное обеспечение для обработки необработанных данных LiDAR, которое позволяет создавать облака точек LAS из необработанных данных LiDAR. Кроме того, оно оснащено дополнительными функциями.
Настройка плотности облака точек
Означает количество точек, собранных на единицу площади. Эта функция позволяет регулировать плотность точек в соответствии с требованиями конкретной отрасли.
Оптимизация точности облака точек
Эта функция использует алгоритм сохранения локальных проекций (LPP), чтобы минимизировать обычное явление наслоения облаков точек, заставляя облака точек выравниваться по более тонкому слою, что повышает точность модели облака точек.
Сглаживание облака точек
Эта функция улучшает облако точек, отфильтровывая шум и уменьшая влияние ошибок, чтобы создать более гладкое визуальное представление.
Классификация наземных точек
Используется для отличия наземных точек от других объектов в облаке точек для создания цифровой модели рельефа (DEM).

Генерировать ЦМР
Эта функция генерирует цифровую модель рельефа (ЦМР) в формате GeoTiFF из классифицированного облака наземных точек.
Проверка точности по вертикали и сдвиг
Проверяет точность данных LiDAR с помощью контрольных точек высот, чтобы убедиться, что полученные ЦМР или ЦМТ являются точным отображением местности.
Трансформация системы координат
Позволяет легко преобразовывать местные проецируемые или геодезические системы координат для различных картографических и геодезических проектов по всему миру.

Области применения воздушного лидара
Управление лесным хозяйством
LiDAR имеет широкий спектр применения в лесном хозяйстве. С его помощью можно оценить высоту деревьев, измерить биомассу и составить карту структуры леса. Используя LiDAR, лесоустроители могут получить подробную информацию о лесном пологе, которую трудно получить с помощью традиционных методов съемки. Одним из ключевых преимуществ LiDAR является его способность улавливать несколько возвратов от одного лазерного импульса, что позволяет ему “видеть” сквозь растительность и точно отображать поверхность земли. Эта способность делает LiDAR особенно полезным для оценки высоты местности и выявления изменений в лесном покрове с течением времени, что может быть полезно для отслеживания процесса обезлесения и восстановления лесов. Кроме того, LiDAR может помочь в составлении лесных кадастров, что очень важно для устойчивого управления лесами.
Измерение объемов
Технология LiDAR позволяет проводить точные измерения для вычисления объемов, что полезно для таких отраслей, как горнодобывающая промышленность, строительство и лесное хозяйство. Используя данные облака точек LiDAR, можно точно рассчитать объем склада или количество материала, вывезенного с участка. Эта информация может использоваться для управления запасами, контроля затрат и планирования ресурсов.
Топографическая съемка
LiDAR – эффективный инструмент для топографических съемок, поскольку он позволяет точно отобразить форму и особенности земной поверхности. В отличие от фотограмметрии, LiDAR может проникать сквозь полог и получать точные измерения поверхности земли даже в районах с густым растительным покровом. Это происходит потому, что LiDAR использует лазерные импульсы для обнаружения земли и полога деревьев, проникая сквозь щели между листьями, что позволяет лучше определять точки на местности.
Археологические исследования
Воздушный LiDAR может быть легко использован в археологических исследованиях для картирования массивных, труднодоступных территорий и обнаружения скрытых структур на поверхности. Датчик LiDAR может проникать сквозь растительность и получать данные высокого разрешения, что позволяет выявлять структуры, которые трудно или невозможно увидеть с земли. Это может помочь археологам лучше понять планировку древних городов и поселений и получить представление о деятельности человека в прошлом.
Обследование линий электропередач
Технология LiDAR может быть использована для обследования линий электропередач, что может быть непросто из-за высоты и расположения линий. Используя данные облака точек LiDAR, можно создать подробную карту линий электропередачи и их окрестностей. Это поможет выявить потенциальные проблемы, такие как рост растительности или провисание линий, которые могут стать причиной отключения электроэнергии или угрозы безопасности.
Инспекция инфраструктуры
Благодаря способности LiDAR обнаруживать мелкие дефекты и трещины, многие используют эту технологию для сканирования дорог и фасадов зданий/мостов. Это может помочь предупредить руководителей проектов о проблемах со структурами, которые необходимо немедленно устранить. При съемке фасадов важно использовать систему LiDAR с гимблированием, чтобы она была направлена на фасад.